發布日期:2022-08-21 點擊率:48
摘 要:本文針對礦井提升機故障診斷方法存在的局限性,運用了一種基于多傳感器信息融合的智能故障診斷方法。該方法采用D-S證據理論決策級融合進行故障識別,利用統計證據獲得基本概率賦值。通過一實例論證了在礦井提升機故障診斷中,采用此方法比單傳感器信息故障診斷方法更具有優越性。
關鍵詞:信息融合;故障診斷;統計證據
0 引言
設備故障是指“設備功能失常”,也就是設備不能達到預期的工作狀態,無法滿足應有的性能、功能。設備故障診斷技術是近40年來發展起來的適應工程實際需要而形成的一門綜合學科,是各學科交叉發展的必然,由此獲取的經濟效益十分顯著。
所謂多傳感器信息融合是對來自多個傳感器的信息進行多級別、多方面的處理,從而導出新的、有意義的信息,而這種新信息是任何單一傳感器所無法獲得的,它表示了被檢測目標對象的行為。通過多傳感器信息融合,可以擴大時空覆蓋范圍,增加置信度,改善檢測系統的可靠性[1]。
本文研究基于統計證據獲得基本概率賦值,利用基于基本概率賦值的D-S證據理論決策級融合方式,對礦井提升機的故障進行識別。
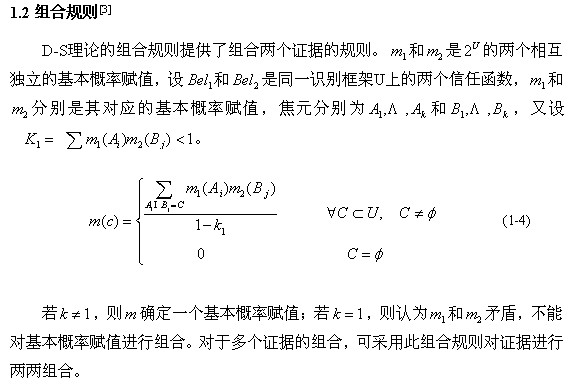
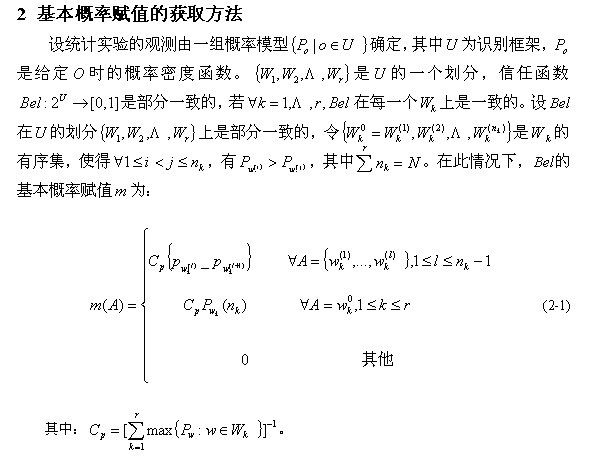
1 多傳感器數據融合算法
將D-S證據理論應用于多傳感器數據融合時,從傳感器獲得的相關數值就是該理論中的證據,它可構成待識別目標模式的信度函數分配,表示每一個目標模式假設的可信程度,每一傳感器形成一個證據組。多傳感器數據融合就是通過聯合規則聯合幾個證據組形成一個新的綜合的證據組,用聯合規則聯合每個傳感器的信度函數分配形成融合的信度函數分配,從而為目標模式的決策提供綜合準確的證據。
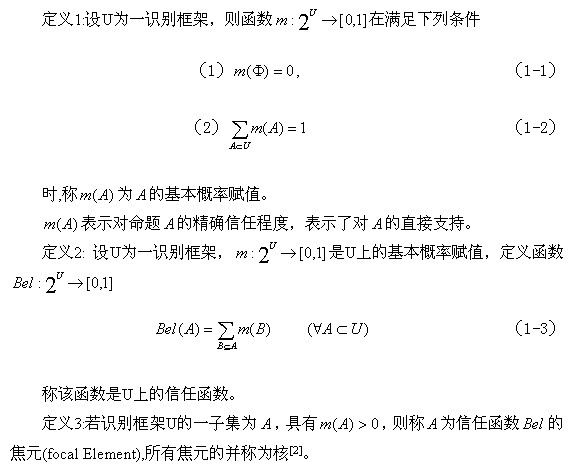
1.1 D-S證據理論基本概念
證據理論是由Dempster在1967年最初提出的,他用多值映射得出了概率的上下界,后來由Shafer在1976年推廣并形成證據推理,因此又稱為Dempster-Shafer理論。設U表示X所有可能取值的一個論域集合,且所有在U內的元素間是互不相容的,則稱U為X的識別框架。
U可以有限也可以無限,在專家系統的應用中是有限的。
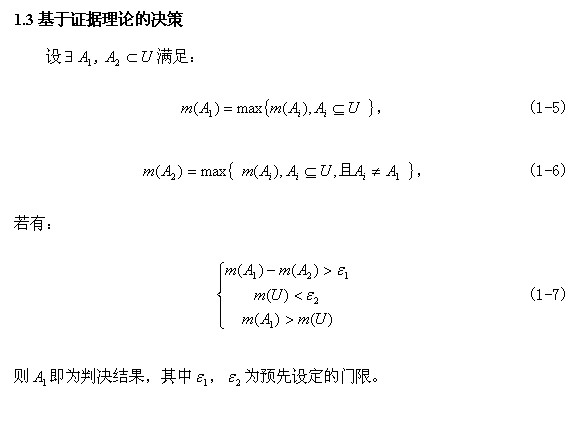
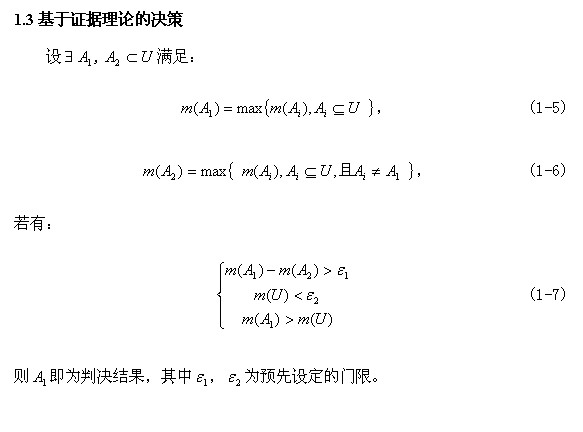
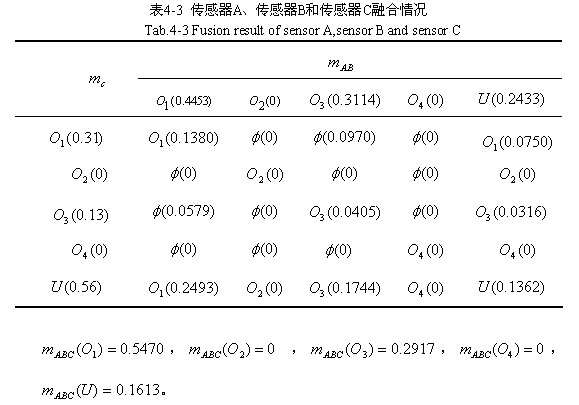
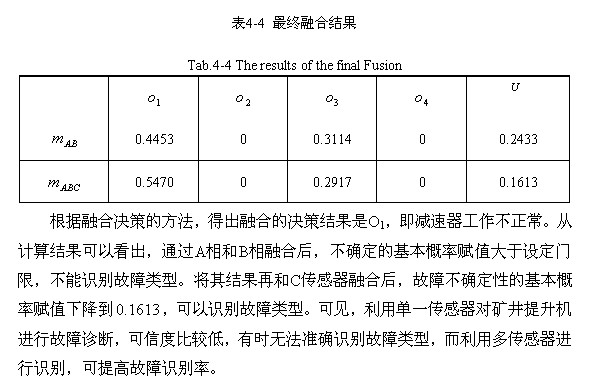
根據融合決策的方法,得出融合的決策結果是O1,即減速器工作不正常。從計算結果可以看出,通過A相和B相融合后,不確定的基本概率賦值大于設定門限,不能識別故障類型。將其結果再和C傳感器融合后,故障不確定性的基本概率賦值下降到 ,可以識別故障類型。可見,利用單一傳感器對礦井提升機進行故障診斷,可信度比較低,有時無法準確識別故障類型,而利用多傳感器進行識別,可提高故障識別率。
4 結論
從分析結果可以看出,僅利用單一傳感器信息對礦井提升機故障進行診斷識別,其結果存在許多誤診和漏診的情況;而基于多傳感器信息融合的故障診斷能充分地利用多個傳感器的信息,可以減少診斷的不確定性,能夠識別單一傳感器不能識別的故障;隨著融合傳感器個數的增多,診斷的可靠性也會越來越高。
參考文獻
[1] 何友,王國宏等. 多傳感器信息融合及應用[M]. 北京:電子工業出版社,2007,40-45
[2] 黃瑛,陶云剛等,D-S證據理論在多傳感器數據融合中的應用[J].南京航空航天大學學報 ,1999,31(2):172-177
[3] 王江萍.基于多傳感器融合信息的故障診斷[J].機械科學與技術,2000,19(6)
[4] 盧燕.礦井提升機的故障監視和診斷.金屬礦山,1998.3
下一篇: PLC、DCS、FCS三大控
上一篇: 重視傳感器在設施農業

型號:ML200PS1PC
價格:面議
庫存:10
訂貨號:ML200PS1PC

型號:ABH200PSC1B
價格:面議
庫存:10
訂貨號:ABH200PSC1B

型號:GLGD12D
價格:面議
庫存:10
訂貨號:GLGD12D

型號:19C003PG1K
價格:¥8000
庫存:10
訂貨號:19C003PG1K

型號:13C0500PA1K
價格:¥5500
庫存:10
訂貨號:13C0500PA1K

型號:SPT4V5000PS5W10
價格:¥7500
庫存:10
訂貨號:SPT4V5000PS5W10


