發布日期:2022-10-09 點擊率:53
關鍵詞: 邁信 EP3E SCARA機器人
摘要:本文旨在介紹EP3E伺服驅動器在SCARA機器人上的應用,同時為客戶提供一套完整的基于POWERlink總線的機器人電控系統解決方案。
SCARA機器人是桌面型的4關節機器人的機型,廣泛應用于金屬加工行業的上下料、電子產品行業的點膠、涂膠與搬運、玻璃行業的搬運與組裝。雖然國內機器人處于快速的發展中,但國內的SCARA機器人大多都是采用脈沖方式控制,一個運動控制單元只可以完成單個SCARA機器人的控制,無法完成SCARA機器人各軸的狀態監視與控制。
EP3E-EP
EP3E伺服驅動器是武漢邁信電氣技術有限公司推出的國內首款基于POWERlink總線的伺服驅動器:可外接單圈或者多圈絕對式編碼器;實時總線抖動在線同步調整等創新技術,為客戶提供更加高性能,更加靈活,更加安全的伺服系統。
EP3E伺服驅動器從產品尺寸、接線方式上非常適合多機器人的工業現場生產,其POWERlink總線一網到底的連接方式,為客戶的SCARA機器人自動化流水線提供更多便利,將為客戶提供更具性價比的方案。
本次項目所使用的SCARA機器人,具有結構緊湊,生產效率高,精度高,過載能力強等特點。該項目用于自動點膠生產線,同時也適用于點膠工藝,激光切割,焊錫等場合。
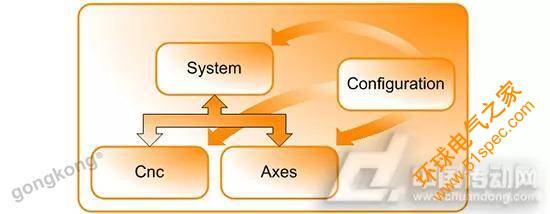
圖1、SCARA機器人解決方案的照片
系統設計
1、客戶需求
客戶要求SCARA機器人具備較高的加工速度,以及較高自動化水平,能夠自動完成產線的上料、下料等功能,同時要求高穩定性。此外,客戶還要求能夠通過遠程訪問來實時查看機器人的工作狀態。
2、系統設計方案
通過對客戶需求的深入分析,我們為客戶設計了“B&R的X20控制器+EP3E伺服驅動器”的電控解決方案,如圖2所示。

圖2、SCARA機器人電氣方案圖
系統優勢
1、融合MC,CNC,robotics的X20運動控制系統
基于X20的運動控制解決方案:利用通用運動控制技術設計平臺,通過POWERlink總線技術將機器人、CNC、多軸運動和單軸定位組成一個系統。可以將復雜的路徑信息應用到機床和生產機械中;還可以實現控制多軸的關節機器人,進行復雜的3D圖CNC加工;借助實時操作系統,運動控制循環時間可達400μs,CNC、PLC、I/O和驅動器可至微秒級高精度同步;同一處理器處理運動控制和邏輯控制,CNC和PLC同步運行任務。
X20的軟件框架如圖3所示,所支持的CNC技術包括:
支持標準DIN66025的標準語言,支持客戶自定義解釋語言;
每個系統擁有8個CNC通道,每個CNC通道插補最多15個軸參與,每個CNC通道非插補不限制軸數;
各路徑段具有“程序段預讀”功能,優化運動軌跡,可以實時更改速度倍率;
自動切線刀具向導,廣泛應用于皮革切割、玻璃切割等行業;
沿輪廊反向運動,廣泛應用于激光切割、水切割等行業;
二十余種多軸運動轉換,支持客戶自定義坐標變換;
單向和雙向螺距誤差補償和反向間隙補償,支持直角坐標系的軸偏移補償;
所有技術功能:銑、磨、切割、焊接、搬運、包裝、木工、紅木、石材、大理石、玻璃切割等行業。

圖3、軟件框架
2、EP3E高性能伺服驅動器
EP3E是國內首家通過EPSG組織(The Ethernet POWERlink Standardization Group)的一致性測試的產品,因此可以很好的與X20控制器進行配合;EP3E內置的電流環、速度環、位置環的控制周期分別為50μs、100μs、100μs;可以支持17bit的單圈與多圈編碼器,以及20bit的單圈與多圈編碼器;支持實時以太網總線的抖動同步調整技術,可以充分滿足MC、CNC、robotics對于動態響應和同步性的要求。
3、系統軟件框架

圖4、系統軟件框架
系統軟件由Configuration、System、CNC以及Axes等模塊組成:Configuration模塊負責整個系統的配置工作;System負責系統狀態機;CNC和Axes分別負責插補通道狀態機和軸狀態機。為實現完整的機器人軟件功能,系統軟件還包括如坐標變換、伺服通訊及人機界面通訊等功能。
系統性能測試
在實際測試過程中,系統用了極短的時間就調試成功。
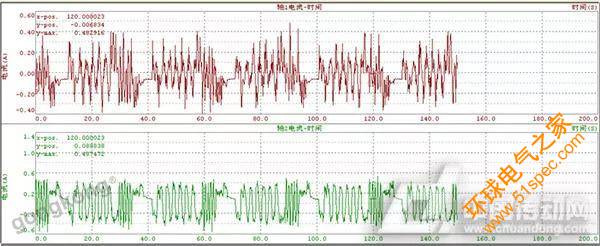
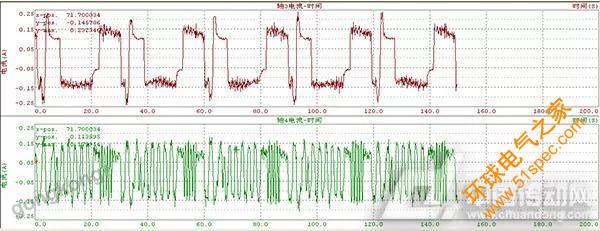
圖5、SCARA機器人各軸工作電機電流的trace數據
武漢邁信電氣技術有限公司致力于為國內自動化設備廠商提供POWERlink總線伺服驅動器,在性能與功能上能夠滿足MC、CNC、robotics各個行業對伺服系統的要求,同時,價格上也沒有國外伺服驅動器那么高昂,從而實現國產SCARA機器人的POWERlink總線化,降低國產機器人的總體成本,提高國產機器人的競爭力。
下一篇: PLC、DCS、FCS三大控
上一篇: MATLAB和Simulink在航


